센서는 로봇이 주변 환경을 이해하기 위해 사용하는 장치입니다. 로봇에게 눈과 귀 같은 역할을 하며, 데이터를 수집합니다.
주요 센서 종류
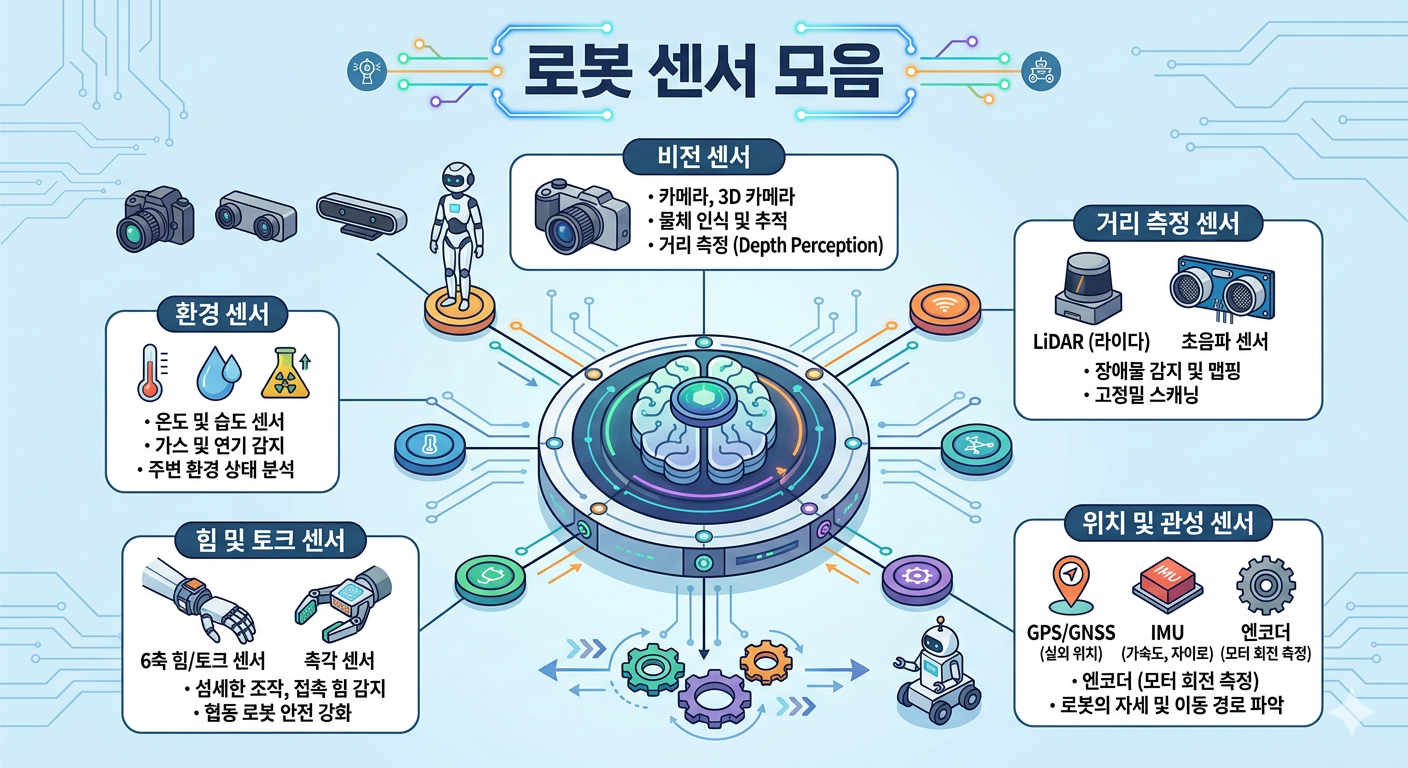
- 카메라 센서: 시각 정보를 처리
- 초음파 센서: 물체와의 거리 측정
- 라이다 (LiDAR): 3D 환경 정보 획득
- 적외선 센서: 장애물 감지

제어장치는 센서로부터 입력된 정보를 바탕으로 로봇의 동작을 계산하고 결정하는 ‘두뇌’입니다. 마이크로컨트롤러 또는 CPU가 포함될 수 있습니다.
- 마이크로컨트롤러: 소형 로봇에 사용되는 CPU
- 임베디드 시스템: 로봇 전용 제어 컴퓨터
- AI 프로세서: 인공지능 계산을 위한 특별 CPU
구동장치는 로봇의 몸을 움직이게 하는 부품입니다. 전기모터, 유압 실린더, 서보모터 등이 포함됩니다.
- DC 모터: 회전 운동 생성
- 서보모터: 정밀한 위치 제어
- 피에조 액추에이터: 작은 진동·움직임 생성

로봇이 작동하기 위한 에너지를 제공하는 부품입니다. 휴대용 로봇에는 배터리가 필수적이며, 큰 로봇은 외부 전원을 사용하기도 합니다.
- 리튬이온 배터리: 고용량·가벼운 배터리
- 연료전지: 장시간 작동에 적합
- 전원 어댑터: 고정형 로봇용 전원

로봇의 각종 센스로 부터 얻은 정보와 AI학습을 통해 얻은 정보를 통합해 로봇의 동작을 제어하는 운영프로그램입니다.
ROS는 로봇 개발의 복잡성을 줄이고, 모듈화된 개발을 가능하게 하여 개발 생산성을 높이는 데 기여합니다. ROS의 주요 구성 요소는 다음과 같습니다:
- 노드: 각 구성요소 제어
- 메세지: 노드간 데이터교환-통신
- 토픽: 메세지교환 통로
- 서비스: 특정작업 수행 요청
- 액션: 장시간작업 통신방식
- 파라미터 서버: 노드 간에 공유되는 설정값 저장, 관리
- 도구: 시각화, 시뮬레이션, 데이터 기록, 재생도구 등